
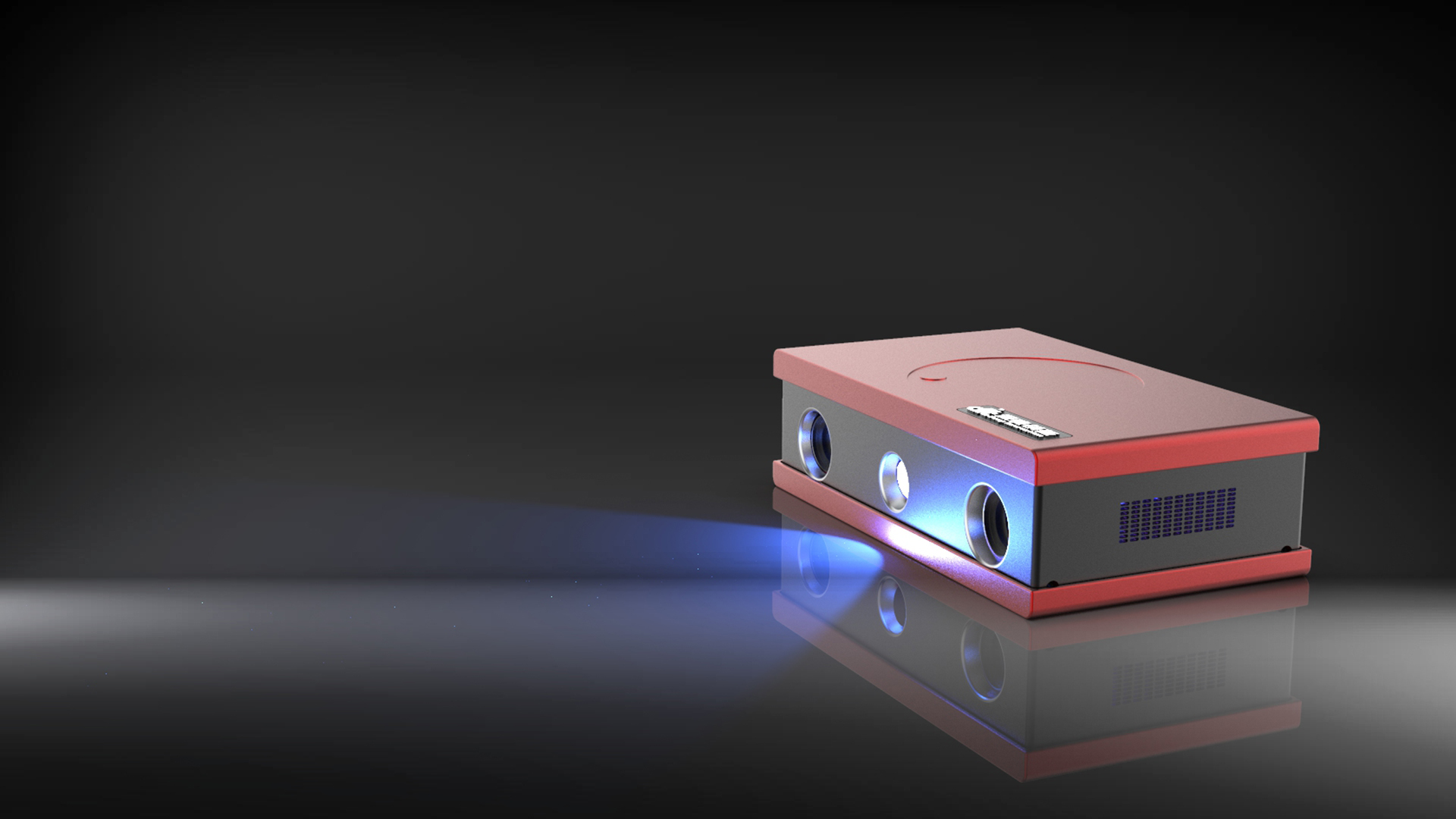
嵌入式3D相机
内部集成运算单元、直接生成点云,通过网口传输数据。


核心优势
“Product Information”
-
 5.5x3.5x10.5cm小 12.5kg
5.5x3.5x10.5cm小 12.5kg -
5.5x3.5x10.5cm中 24.5kg
-
5.5x3.5x10.5cm大 48.5kg


产品展示
“Product Display”
NORDIC HOME
NORDIC HO ME FURNISHING



FLORAL ORGAN
Have you all the way
<< TAKE HOME

产品细节
“Product Details”





卧室

书房

客厅
产品故事
“Product Story”
-
扫描原理单目条纹结构光;双目条纹结构光
-
扫描精度1/10000(100毫米视场宽度时,精度0.01mm)
-
光源白光LED;蓝光LED
-
计算单元NVIDIA GPU芯片
-
传输接口千兆网
-
扫描+点云2 秒/单面(500万点云)
-
输出深度图;4D点云(XYZI)
-
投影分辨率1280*800;1920*1080
-
尺寸258mm * 146mm * 70mm
넶浏览量:0



